|
|
Research Robots
|
|
|
The Robotics Research Corporation of
America produced this robot in 1988 for NASA to study the possibility of using robots to
perform maintenance on the International Space Station.
Each of the robot's arms has 7 joints and they are
mounted on a torso with 3 joints, giving the robot a
total of 17 degrees of freedom. As discussed on the industrial
robots page, a robot only needs 6 joints in
general to arbitrarily position a rigid body in space.
This robot's arms are called redundant arms because they
have seven joints. The extra joints enable the robot to perform many tasks in an infinite number of
different ways - just like human arms. For example, he
can reach around obstacles. The single serial chain (the
torso) branching into two separate chains (each arm)
makes this robot an excellent test bed for development
of kinematic optimization algorithms.
Though these robots were developed 30 years ago, they remain a high-water mark in their kinematic capabilities. |
|
|
|
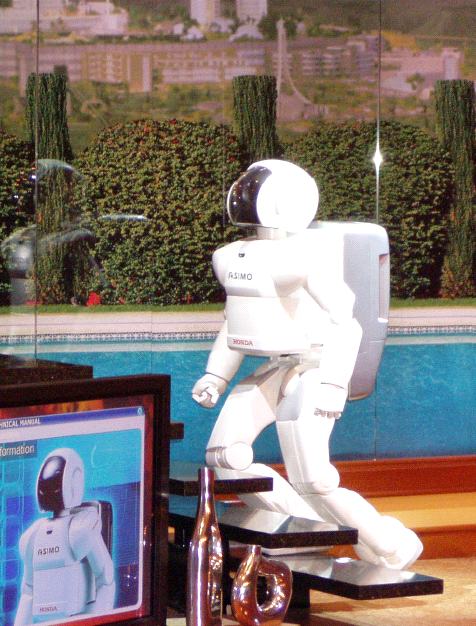
ASIMO may be the most recognizable of
robots around these days. I could not decide whether to put this robot on
the learnaboutrobots research page or on the entertainment page. Honda
calls ASIMO a research robot, so I'll call him that too.
ASIMO stands for Advanced Step in Innovative Mobility. It is 4 feet high and it can move a lot like we do, with 26 degrees of freedom. That means being able to move
26 different joints in 26 different directions. It
can move forward and backward while maintaining balance.
The Honda engineers who have been working on ASIMO have concentrated on making it move in our world so it could be useful to help the elderly or wheel-chair-bound. ASIMO
can answer the door, pick up a phone or
get the newspaper. It is often on tours designed to get young people
excited about science and engineering. |
|
|
|
 |
A number of researchers have embraced the idea of miniature robots working together in swarms.
Doug Adkins and Ed Heller developed the robot at left at Sandia National Lab. At 1/4 cubic inch and weighing less than an ounce, it is possibly the smallest autonomous untethered robot ever created. Powered by three watch batteries, it rides on track wheels and consists of an 8K ROM processor, temperature sensor, and two motors that drive the wheels. Enhancements being considered include a miniature camera, microphone, communication device, and
a chemical micro-sensor. |
|
|
|
|